近日,bat365在线平台官方网站、水声通信与海洋信息技术教育部重点实验室张宇教授团队及其合作者在跨介质机器人领域取得重要进展,相关成果以“Mudskipper-inspired amphibious robotic fish enhances locomotion performance by pectoral-caudal fins coordination”为题发表于Cell旗下物质科学期刊Cell Reports Physical Science. 此次研发的仿生弹涂鱼两栖机器人能够实现较好的多功能性和环境适应性,为研发新型仿生两栖机器人提供了重要参考。
研究背景
传统的两栖机器人通常是将陆地和水下驱动装置进行简单组合,运动效率和机动性能等方面都有待提升。由于水下环境较为复杂,传统的两栖机器人难以在水下实现高效灵活的运动。弹涂鱼是为数不多的一种两栖鱼类,它在水下采用鱼类的游动方式,利用尾鳍和身体的摆动产生推进力;在陆地上则采用类似“拄拐式”运动,利用一对胸鳍摩擦地面来推进。这两种运动方式能够很好地适应水陆两栖运动环境,具有较高的运动效率。在一些复杂的运动环境或者运动状态下,弹涂鱼还可以利用胸鳍和尾鳍的协调作用来提高运动的灵活性和机动性,这给研究团队提供了新思路。
研究结果
基于以上弹涂鱼的两栖运动特性,研究团队研发了一种仿生弹涂鱼两栖机器人(MIARF)(图1)。该机器人能够根据水陆两种不同的运动环境采用不同的运动模式,通过胸鳍-尾鳍的协调作用来实现陆地及水下复杂环境中的高能量效率与高机动性。
研究团队还对比了仿生弹涂鱼两栖机器人和两栖虫型机器人(Multimodal EELWORM)、哈佛移动微型机器人(HAMR)、耶鲁两栖机器龟(Yale ART)等常见两栖机器人的运输成本(Cost of Transport, COT)。结果表明,仿生弹涂鱼两栖机器人的两栖运动效率优于大多数的两栖机器人,特别是水下的运动效率。同时,与单模态机器人例如单模态虫型机器人(Earthworm robot)、水母机器人(Robotic jellyfish)等相比,仿生弹涂鱼两栖机器人在对应的模态运动中的运动效率也高于部分单模态机器人(图2)。此外,其在陆地和水中的转弯速度分别提高了50.1%和24.4%(图3),说明通过胸鳍和尾鳍的协调作用有效提高了仿生弹涂鱼两栖机器人在两栖运动环境中的机动能力。水陆两栖机器人具有巨大的应用潜力,该研究为开发先进的多用途机器人系统提供了有价值的见解。
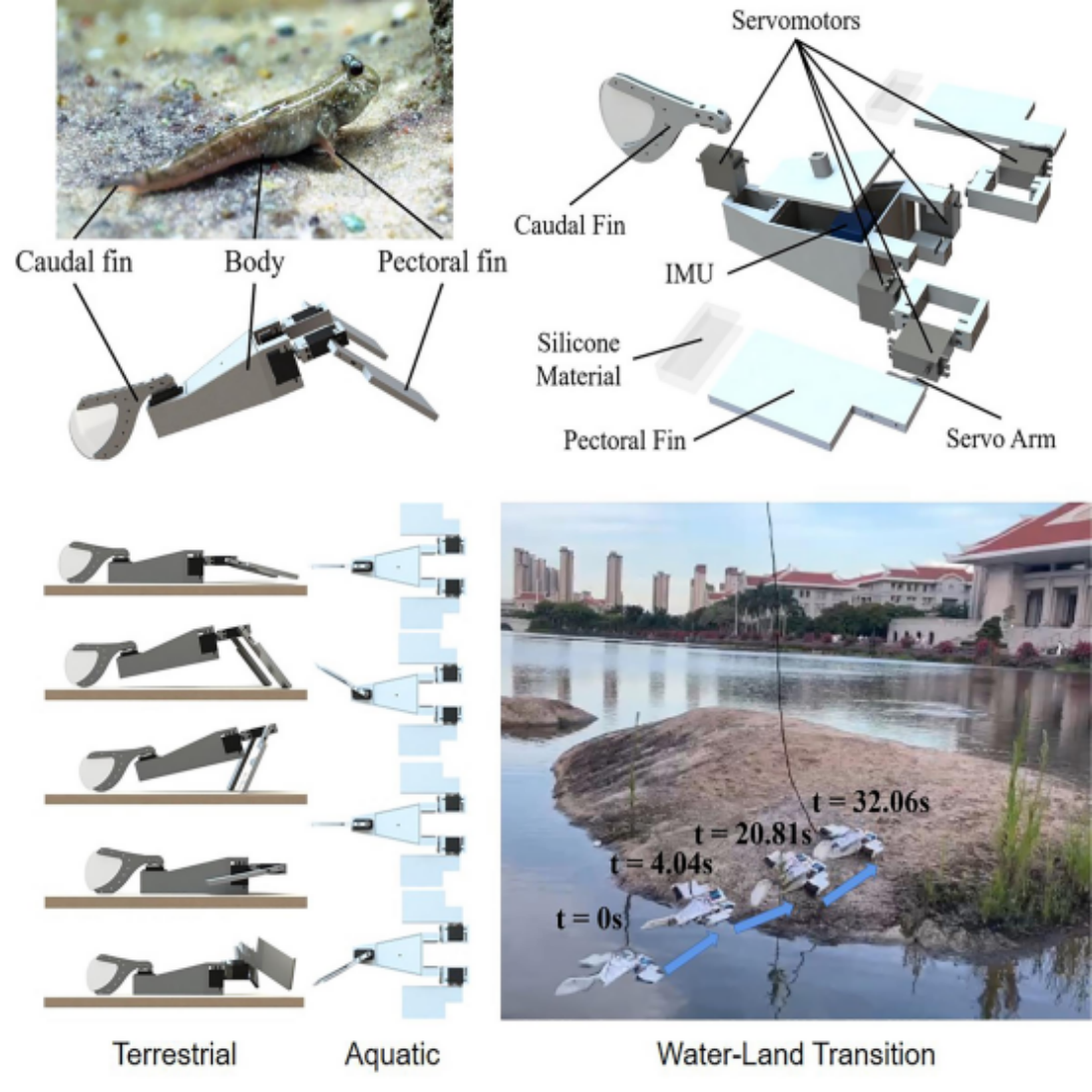
图1. 仿生弹涂鱼两栖机器人仿生来源、结构及运动设计、野外两栖切换运动展示
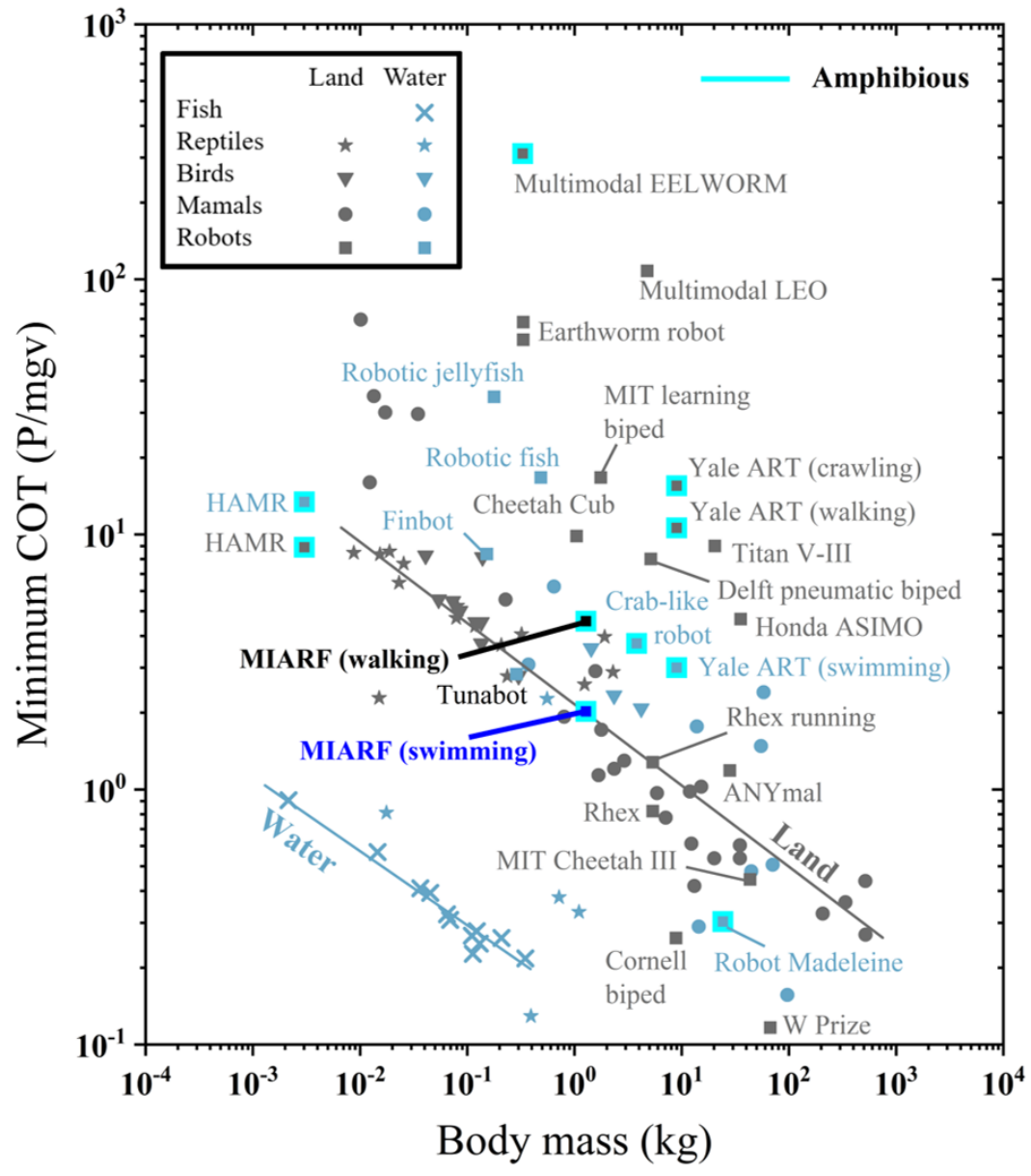
图2. 仿生弹涂鱼两栖机器人MIARF与其他机器人和生物的最小运输成本对比
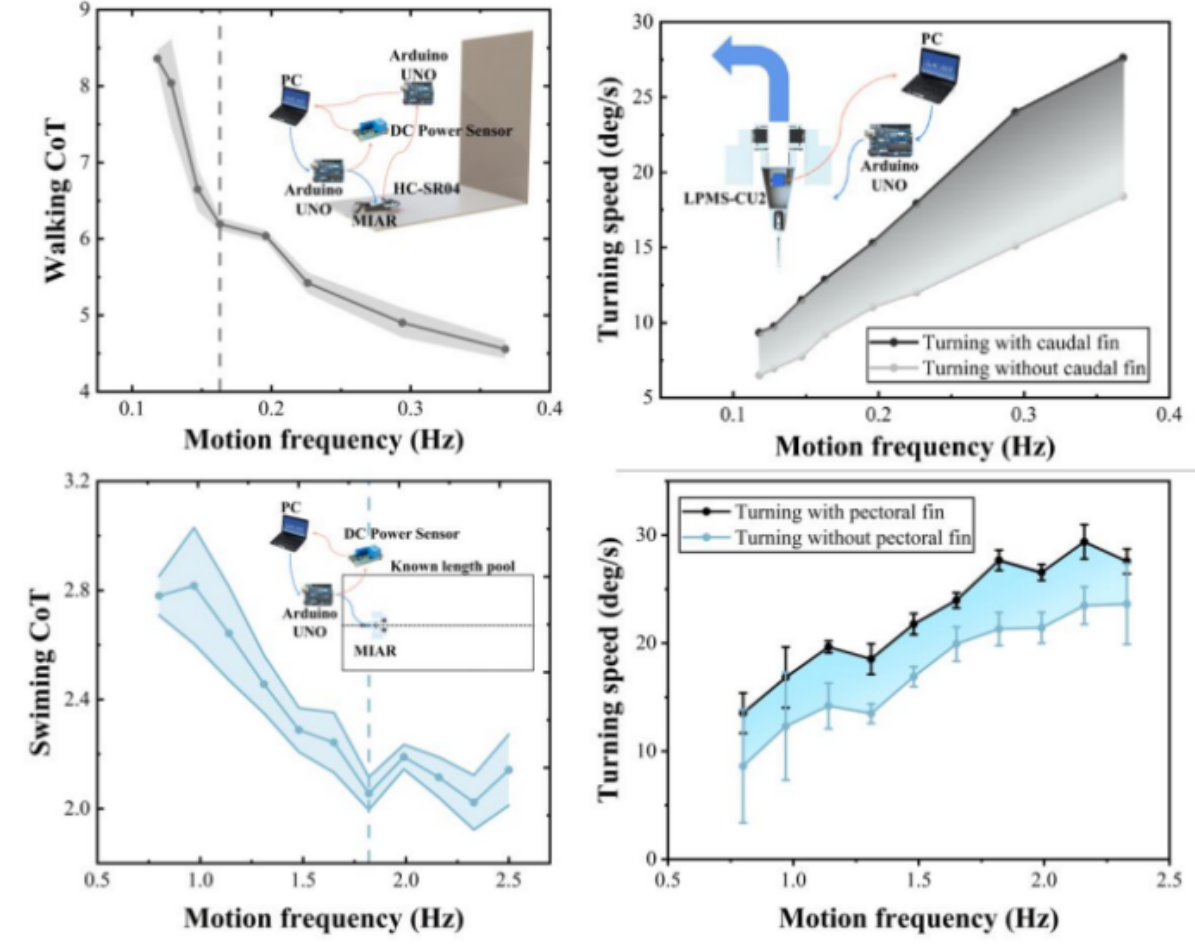
图3. 仿生弹涂鱼两栖机器人两栖直线运动速度、效率测试及转向运动转速测试结果
团队介绍
张宇教授领衔的我校海洋仿生声学与技术实验室(Marine Bioinspired Acoustics and Technology Laboratory) 长期致力于生物声学机理、声学功能材料、仿生技术与应用研究。该论文第一作者为bat365在线平台官方网站博士后林中路和硕士生郑炜,通讯作者为张宇教授和萨本栋微米纳米科学技术研究院周伟教授。我校水声通信与海洋信息技术教育部重点实验室为第一署名单位。该研究获得国家自然科学基金项目(12074323、42106181)、福建省科技重大专项(2021NZ033016) 和博士后科学基金项目(2021M691865)等的联合资助。
论文来源
Zhonglu Lin, Wei Zheng, Jinhu Zhang, Wenzhan Ou, Chen Yang, Hongbin Huang, Wenjun Xu, Zhuoyuan Yang, Wei Zhou*, Yu Zhang*. Mudskipper-inspired amphibious robotic fish enhances locomotion performance by pectoral-caudal fins coordination [J]. Cell Reports Physical Science, 2023.
论文链接
https://www.cell.com/cell-reports-physical-science/fulltext/S2666-3864(23)00397-1
供稿:张宇教授团队
编辑:苏颖
审核:陈友淦、刘志宇、唐腾凤
